CAO – Conception assistée par ordinateur
Saisie du schéma et routage de la carte électronique sous Eagle.
Principe de la CAO
- La Conception Assistée par Ordinateur consiste à utiliser un logiciel pour concevoir, modifier, visualiser et documenter un objet avant sa fabrication.
- Le logiciel KiCad permet de :
- Concevoir des schémas électroniques
- Créer des circuits imprimés (PCB)
- Gérer des empreintes de composants (footprints)
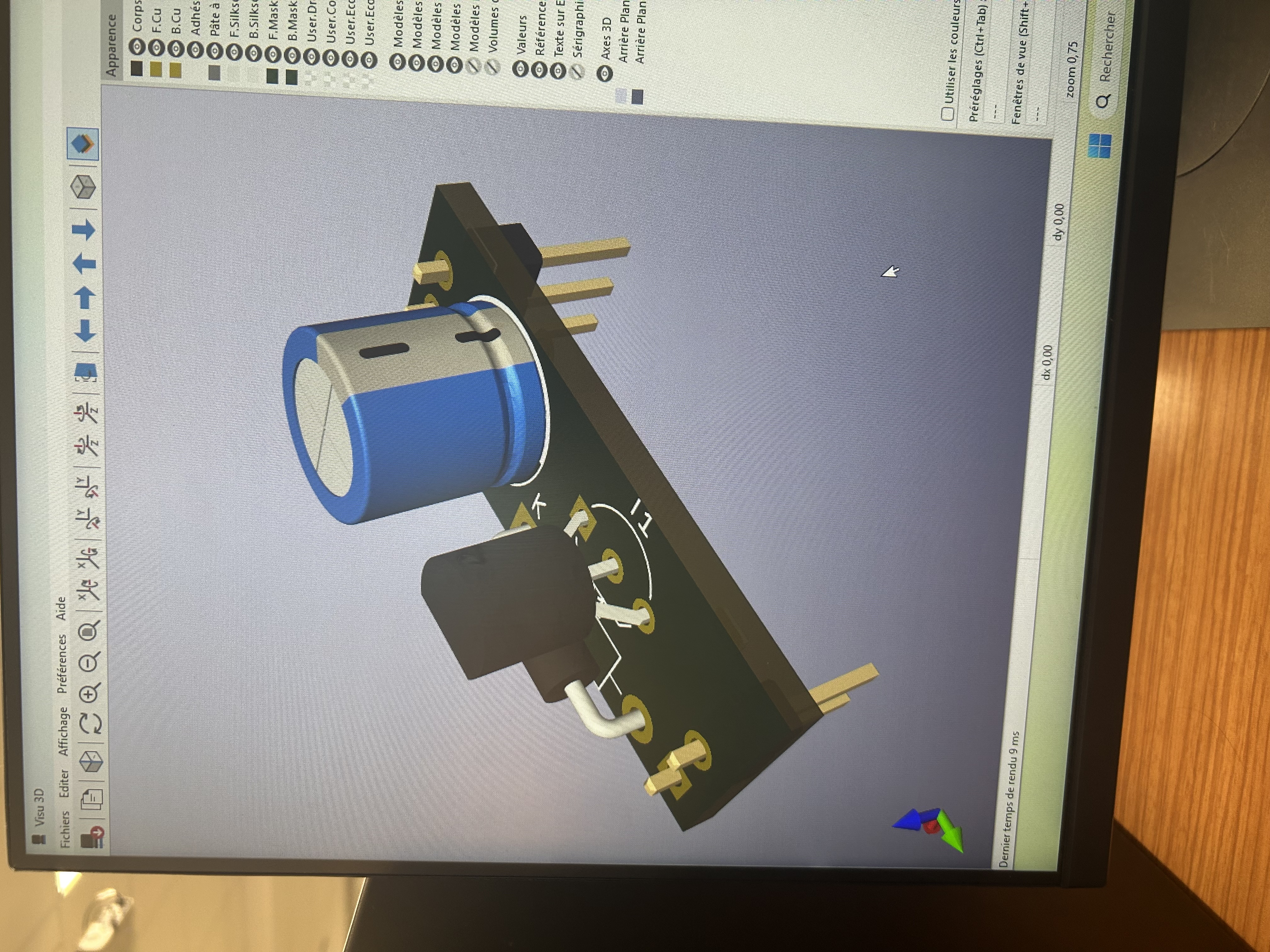
- Visualiser le circuit en 3D
- Gérer des bibliothèques de composants personnalisées
- Vérifier erreurs et incohérences
- Importer et exporter des projets et fichiers standard
Saisie de schéma
Détailles carte moteur PCB :
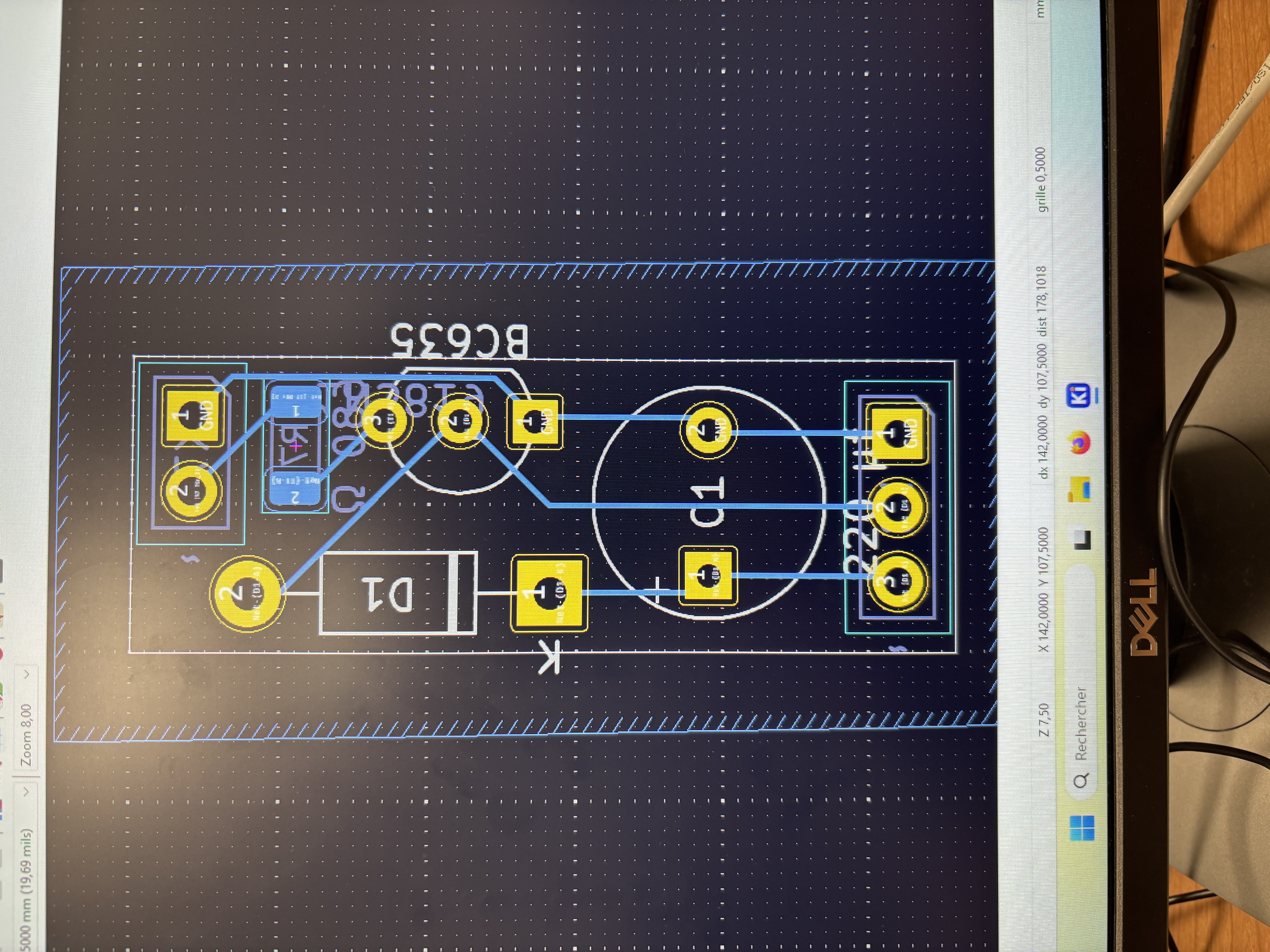
Liste de ce qu'on y vois:
- Un transistor BC635 (marqué “BC635”)
- Une diodes schottky D1 (avec indication de la cathode “K”)
- Un condensateur électrolytique (marquage probable “220 µF”)
- Un connecteur d’alimentation (pads étiquetés “GND” et probablement “+”)
- Un connecteur moteur (pads en bas de la carte)
- Des pistes (reliant les composants, en bleu pour une face, en cyan pour l’autre)
- Le contour du PCB (rectangle blanc tout autour)
Explication carte moteur PCB :
Transistor BC635 : agit comme un interrupteur commandé. Il contrôle l’alimentation du moteur à partir d’un faible courant issu du circuit de commande.
Diode D1 : diode de roue libre qui protège le transistor contre les pics de tension générés par le moteur lorsqu’il s’arrête brutalement.
Condensateur électrolytique 220 µF : sert à lisser l’alimentation et éviter les chutes de tension lors des démarrages ou variations du moteur.
Connecteur d’alimentation : fournit le + et le GND nécessaires au fonctionnement du circuit. Le + passe par le transistor avant d’aller au moteur.
Connecteur moteur : sortie vers le moteur, transmet la puissance contrôlée par le transistor.
Composant Q1 : selon le footprint, peut être un transistor de puissance ou un relais. Il gère la commutation ou augmente la capacité de courant.
Pistes : assurent la liaison électrique entre les composants. Leur largeur définit le courant maximal supporté. Leur couleur définit leur couche (rouge = dessus et bleu = dessous).
Contour du PCB : délimite la forme et la taille finale de la carte.
Détails carte robot PCB :
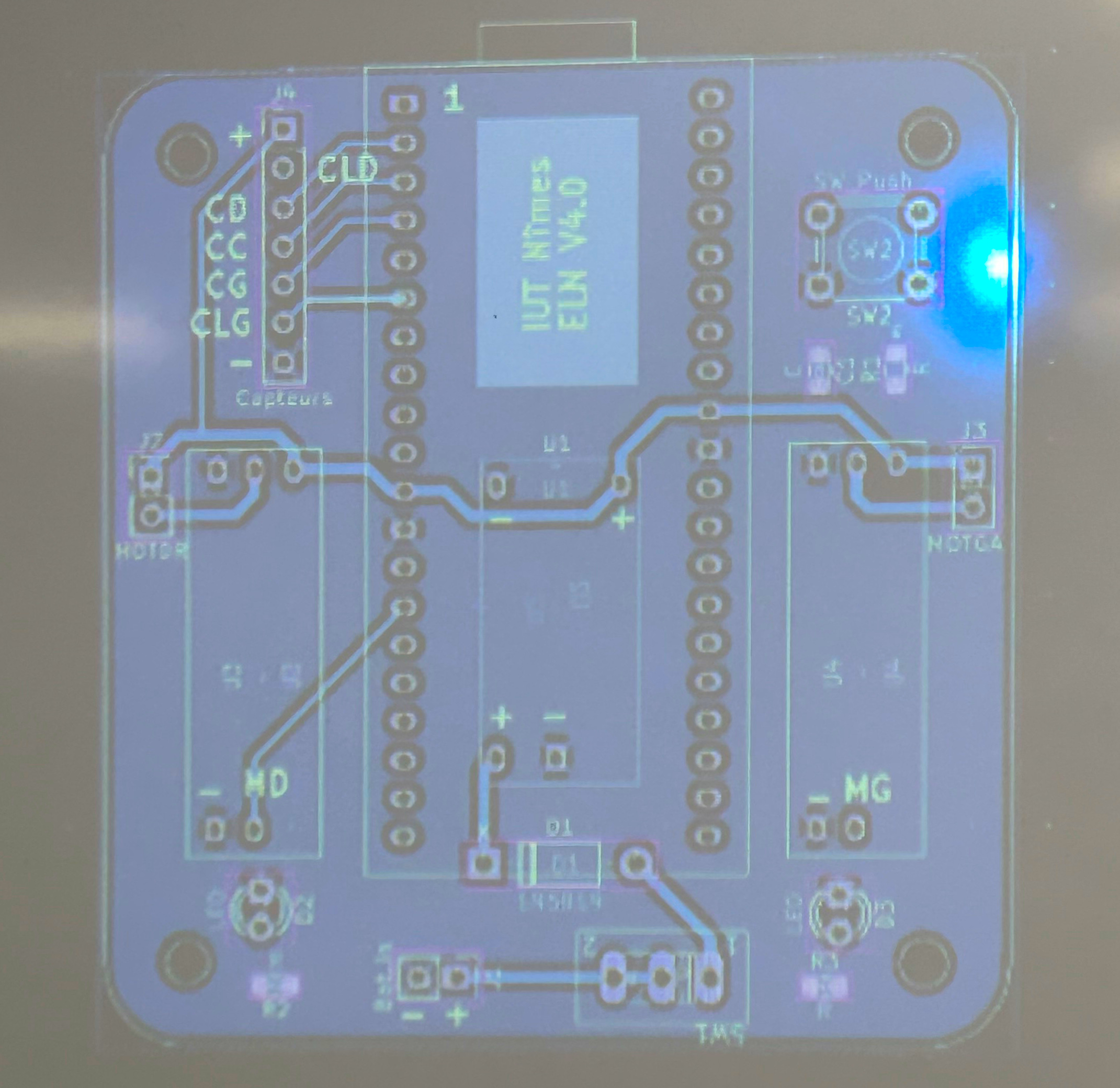
Liste de ce qu'on y voit :
- Un connecteur de capteurs CLG – CG – CC – CD – CLD (bornier d'entrée des capteurs)
- Deux rangées de broches (interface pour la carte principale / microcontrôleur)
- Un boutons poussoirs SW1 (boutons d’action)
- Une diode D1 (1N4148, diode de protection)
- Deux LED d’indication (positionnées en bas à gauche et bas à droite)
- Plusieurs résistances CMS (associées aux boutons, LED et capteurs)
- Un connecteur d’alimentation (alimentation générale du circuit)
- Deux connecteurs moteurs MD et MG (droite et gauche)
- Des pistes (bleu = dessous, cyan = dessus)
- Le contour du PCB (forme carrée avec coins arrondis)
- Des trous de fixation (présents dans les quatre coins)
Explication des éléments :
Connecteur de capteurs CLG – CG – CC – CD – CLD : permet de brancher l’ensemble des capteurs du robot. Chaque pin correspond à un capteur spécifique et transmet son signal vers la carte principale.
Deux rangées de broches : servent d’interface complète avec la carte principale ou un microcontrôleur. Elles véhiculent l’alimentation, les signaux des capteurs, les commandes moteurs et les retours d’état.
Bouton poussoir SW1 : bouton d’action utilisé pour déclencher une fonction du robot, effectuer un test ou valider un paramètre. Il envoie une impulsion logique au microcontrôleur.
Diode D1 (1N4148) : diode de protection servant à éviter les surtensions ou les retours de courant pouvant endommager les circuits sensibles. Elle sécurise l’entrée associée.
LED d’indication : affichent l’état de la carte ou du robot : alimentation active, mode sélectionné, erreur, fonctionnement moteur, etc.
Résistances CMS : limitent le courant dans les LED, stabilisent les signaux des boutons et garantissent un fonctionnement propre des capteurs. Elles évitent les surtensions dans les petites charges.
Connecteur d’alimentation : entrée principale de la carte. Il fournit le + et le GND nécessaires à l’ensemble du système, y compris les moteurs et la logique interne.
Connecteurs moteurs MD et MG : sorties destinées à alimenter le moteur droit (MD) et le moteur gauche (MG). Ils transmettent la puissance issue de la carte de commande vers chaque moteur du robot.
Pistes : assurent toutes les connexions électriques du PCB. Les pistes cyan indiquent la face supérieure, et les pistes bleues la face inférieure. Leur largeur est adaptée au courant qu’elles doivent transporter.
Contour du PCB : délimite la forme et la taille exactes de la carte. Les angles arrondis facilitent le montage et évitent les fissures en production.
Trous de fixation : permettent de fixer solidement la carte dans un châssis ou un support. Ils assurent la stabilité mécanique du PCB pendant le fonctionnement du robot.